


International Demonstration Teaching Team for the Course of Basic of Control
一、课程简介
Introduction
《控制基础》是西里西亚智能科学与工程学院电子科学与技术专业本科三年级学生的必修课程,该课程共计72学时,4.5学分,采用全英文教学模式,秋季学期开设。课程由波兰西里西亚技术大学与燕山大学信息科学与工程学院中外双方教师联合授课。该课程主要围绕经典反馈控制理论展开,包括微分方程、传递函数、时频域分析、系统稳定性与误差分析、系统设计与校正等核心内容,旨在培养学生具备运用控制理论知识解决自动化系统设计、工业控制、智能制造等领域实际问题的能力,同时为从事更高层次的学习和研究奠定基础,对达成专业培养目标起到重要的支撑作用。
Basic of Control is a compulsory course for third-year undergraduate students majoring in Electronic Science and Technology of the Silesian College of Intelligent Science and Engineering at Yanshan University. The course spans 72 teaching hours, is worth 4.5 credits, and is delivered entirely in English during the autumn semester. It is jointly taught by the faculty from the Silesian University of Technology in Poland and the School of Information Science and Engineering of the Yanshan University in China. This course is centered on classical feedback control theory, covering core modules including differential equations, transfer functions, time- and frequency-domain analysis, system stability and error analysis, and system design and compensation. It aims to equip students with the ability to apply control theory to solve practical problems in fields such as automated system design, industrial control and intelligent manufacturing. Meanwhile, it lays a solid foundation for students to pursue advanced study and research, and plays an important supporting role in accomplishing the program's training objectives.
二、团队成员
Team Members
Adam Gałuszka, 工学博士,教授,担任《控制基础》课程的外方负责教师。现就职于西里西亚技术大学自动控制、电子与计算机科学学院。Gałuszka教授拥有丰富的教学经验,他讲授的课程包括控制理论、模式识别等,主要研究方向包括人工智能、静态优化理论与算法设计、博弈论与图论在复杂系统中的应用等。
Dr. Adam Gałuszka serves as the foreign teacher for the course of Basic of Control. He is affiliated with the Faculty of Automatic Control, Electronics and Computer Science of the Silesian University of Technology. Dr. Gałuszka has extensive teaching experience and teaches courses including Control Theory, Pattern Recognition, etc. His main research interests include artificial intelligence, static optimization theory and algorithm design, and the applications of game theory and graph theory in complex systems.
苏博,工学博士,讲师,担任课程的中方共课教师。现就职于燕山大学信息科学与工程学院光电子系。主要讲授模拟电子技术、控制基础等课程,主要研究方向包括非线性多智能体控制、水下机器人非线性控制、多机器人系统协同控制等。
Dr. Bo Su, the Chinese co-teacher for the course from Department of Optoelectronics, School of Information Science and Engineering, Yanshan University. Her main research directions include nonlinear multi-agent control, nonlinear control of underwater robots, and collaborative control of multi-robot systems. She mainly teaches courses such as Analog Electronic Technology and Basic of Control.
陈白,工学硕士,高级实验师,担任课程的中方实验教师。现就职于燕山大学工程训练中心,电工与电子技术实训部。主要研究方向为复杂工况下工业生产过程智能控制的研究与应用。主要承担反馈控制理论、现代控制理论、控制工程基础和控制基础等课程实验教学。
Ms. Bai Chen, senior laboratory instructor for the course from the Engineering Training Center of the Department of Electrical and Electronic Training of Yanshan University. Her research areas include research and application of intelligent control in industrial production process under complex working conditions. She is mainly responsible for experimental courses such as Feedback Control Theory, Modern Control Theory, Fundamentals of control engineering, and Basic of Control.
吕宏诗,工学硕士,实验师,担任课程的中方实验教师。现就职于燕山大学工程训练中心,电工与电子技术实训部。主要研究方向为光学工程。主要承担控制理论等课程实验教学。
Ms. Hongshi Lv, laboratory instructor for the course from the Engineering Training Center of the Department of Electrical and Electronic Training of Yanshan University. Her research areas include optical engineering. She mainly undertakes experimental courses of Control Theory.
李婷,工学硕士,实验师,担任课程的中方实验教师。现就职于燕山大学工程训练中心,电工与电子技术实训部,控制理论实验室。主要研究方向为模糊控制等。主要承担控制理论相关课程实验教学。
Ms. Ting Li, laboratory instructor for the course from the Engineering Training Center of the Department of Electrical and Electronic Training of Yanshan University. Her research areas include fuzzy control, etc. She mainly undertakes experimental courses of Control Theory.
三、团队合作
Teamwork
外教抵校前,中外教师依据中外联合课程规范化建设相关要求,通过电子邮件等多种形式就课程教学工作安排进行了高效的沟通协调,充分结合专业特色与国内教学特点,完成了课程教学的系统性规划,明确了教学课程安排、授课形式、目标任务以及考核方法,双方在教学安排上达成一致意见,为后续教学工作的顺利开展奠定了基础。
Prior to the foreign teacher’s arriving, both Chinese and foreign teachers carried out efficient communication and coordination on teaching arrangements via email and other channels in accordance with the relevant requirements for the standardized development of Sino-foreign joint courses. By fully combining the characteristics of the major and domestic teaching practices, the two sides completed the systematic planning of the course, defined the teaching schedule, modes, objectives, tasks as well as assessment methods, reached a consensus on teaching arrangements, laying a solid foundation for the smooth implementation of subsequent teaching work.
在正式上课前,学院组织召开中外教师联合课程建设座谈会。双方教师围绕课程内容、进度安排等具体工作深入交流,分析了中方学生现有的学科基础及其对后续专业课程学习的支撑作用,进一步细化了实验教学内容、考核方式与授课安排等,为课程教学工作的顺利开展做好了充分准备。
Prior to start of classes, the college organized a joint course development symposium. The two sides conducted in-depth exchanges on content and teaching schedule, analyzed the existing disciplinary foundation of Chinese students and its supporting role for their subsequent professional course learning, and further refined the experimental teaching content, assessment methods and teaching arrangements, making full preparations for the smooth implementation of the course teaching.
理论课程的教学由Gałuszka博士总体负责。教学过程中,他严格对标中方教学要求,融合了国际化的教学理念。内容组织合理有序,知识点讲解深入浅出。课堂上,综合运用多媒体课件与板书,课程重点与难点一目了然。同时,Gałuszka博士非常重视课上互动,鼓励学生积极发言并就疑点交流探讨,课后安排有固定答疑时间,进一步巩固课程教学效果。图1-2为课程教学及习题课场景,图3为学生课后与Gałuszka博士深入讨论的场景。
Dr. Gałuszka was responsible for delivering the lectures. He not only strictly adhered to the teaching requirements of the Chinese side, but also deeply integrated international teaching concepts and cultural perspectives. The course content was rationally organized and systematically structured, and the knowledge points were elaborated in a clear, progressive and insightful manner. The instructor integrated multimedia courseware and traditional blackboard writing throughout the lectures, rendering the key points and difficult contents of the course distinctly visible. In addition, Dr. Gałuszka attached paramount importance to in-class interactive teaching, encouraging students to express their opinions proactively and conduct in-depth discussions on doubtful points. Fixed after-class consultation sessions were arranged to further consolidate the teaching effectiveness. Figs. 1-2 display the scenes of theoretical teaching and exercise sessions, and Fig. 3 presents the in-depth academic discussions between students and Dr. Gałuszka after class.
实验课程的教学由以陈白老师为核心的教学团队系统设计并实施(团队合影见图4)。通过明确的分工与高效协作,理论教学与实验环节得以实现无缝衔接,显著提升了整体教学效果。
The laboratory course was systematically designed and implemented by the teaching team led by Ms. Chen Bai (the team photo is shown in Fig. 4). Through clear division of responsibilities and efficient collaboration, theoretical teaching and experimental sessions achieved seamless integration, which has significantly enhanced the overall teaching effectiveness.

图1 Gałuszka博士授课
Fig.1 show photo of Dr. Gałuszka teaching

图2 Gałuszka博士授课
Fig.2 show photo of Dr. Gałuszka teaching.

图3 Gałuszka博士和同学讨论
Fig.3 capture a moment of Dr. Gałuszka discussing problems with students.

图4 实验团队老师和Gałuszka博士合影
Fig.4 Group photo of the laboratory team teachers with Dr. Gałuszka
为持续激发学生的学习动力、营造积极活跃的课堂氛围,Gałuszka博士在教学环节中进行了多元化的鼓励活动,在课程尾声,对阶段测验中表现优异的学生赠予从国外带来的小礼品,鼓励活动不仅肯定了学生的学习成果,也显著增强了课堂的吸引力。更为重要的是,在整个教学过程中,学生们在课堂讨论及课后答疑等多个环节中,均能积极主动与中外教师交流。这种沉浸式的双语教学体验,不仅使学生扎实地掌握了专业知识,更让他们提前融入真实的学术交流场景,有效锻炼了学生的英语听说能力与国际沟通素养,实现了知识构建与语言应用能力的双重提升。图5是教学激励活动现场照片。
To consistently stimulate students' learning motivation and foster a positive and dynamic classroom atmosphere, Dr. Gałuszka adopted diversified incentive measures. At the end of the course, he awarded small gifts brought from abroad to the students who performed well in the partial tests, which not only recognized students' academic achievements but significantly enhanced the appeal of the class. More importantly, throughout the entire teaching process, students could actively communicate with both Chinese and foreign teachers in classroom discussions and post-class Q&A sessions. This immersive bilingual teaching experience not only enabled students to master professional knowledge solidly, but also allowed them to effectively exercise their English listening and speaking skills as well as international communication literacy in real academic communication scenarios, achieving a dual improvement in knowledge construction and language application abilities. Fig. 5 shows the scene of the teaching incentive activity.


图5 教学激励活动场景
Fig.5 Scene of the Teaching Incentive Activity
教师节当日,学生们向中外教师表达了诚挚的节日祝福。这份心意让中外方教师深受感动,特别是Gałuszka博士亲身感受到了中国“尊师重教”优秀传统文化的魅力。这一温馨互动,不仅体现了融洽的师生关系,也成为跨国文化交流中一次生动而深刻的情感共鸣。图6-7为教师节期间的图片。
On Teachers' Day, students extended their most sincere festive greetings to both Chinese and foreign teachers. This thoughtful gesture deeply moved all the teachers, and Dr. Gałuszka, in particular, personally experienced the charm of China's fine traditional culture of respecting teachers and valuing education. This warm interaction not only reflected the harmonious teacher-student relationship but also served as a vivid and profound emotional resonance within the context of cross-cultural exchange. Figs. 6-7 show the photos taken during Teachers' Day.

图6 学生代表向Gałuszka博士献花
Fig.6 Student representatives sent flowers to Dr. Gałuszka.

图7 中外教师和学生代表合影
Fig.7 Group photo of Chinese and foreign teachers and student representatives
中方共课教师苏博博士负责协助理论课程的教学管理,她密切关注学生的出勤率和课上听课状态,并通过学习通和QQ等形式,建立了高效的教学支持和信息沟通机制,课前及时将PPT学习资料发送到学生手中,课后及时梳理课程重点难点内容并及时与学生分享,同时,承担着理论课程的课后答疑工作,及时回应学生疑问,在Gałuszka博士和学生之间起到了很好的桥梁作用,为学生的理论学习顺利进行提供了支撑。
Dr. Su was responsible for assisting the teaching management of the theoretical courses. She closely monitored students' attendance and in-class learning status, and established an efficient mechanism for teaching support and information communication via Xuexitong (an online learning platform) and QQ (a social media application) chat groups while gave students’ feedback to the foreign teacher. She distributed PPT learning materials to students in a timely manner before classes, sorted out the key and difficult points of the courses and shared them with students promptly after class. In addition, she provided after-class consultation for the theoretical courses and responded to students' inquiries in a timely manner. Dr. Su served as an effective bridge between Dr. Gałuszka and the students, providing solid support for the smooth progress of their theoretical learning.

图8 学习通、QQ群等平台用于教学指导
Fig.8 Teaching guidance through online platforms and social media
四、课程考核方式
Assessment Methods
课程考核采用多元化的形式,突破传统单一期末试卷的局限,构建了包含4次随堂测验、期末考试及实验考核在内的综合性评估体系。这一创新设计不仅实现了对学生学习过程与成果的全方位考查,更通过多维度评价机制,为学生提供了充分展现自身能力与潜力的平台,从而显著激发了学生的学习积极性与主动性。图9为考核体系示意图。
The course adopted a diversified assessment system (4 quizzes+1 final exam+1 experimental assessment), breaking the traditional model of a single final exam paper. This comprehensive assessment system not only evaluated students' learning process and achievements in a more comprehensive way, but also provided them more opportunities to fully demonstrate their abilities, effectively promoting students’ enthusiasm for learning. Fig.9 shows assessment system.
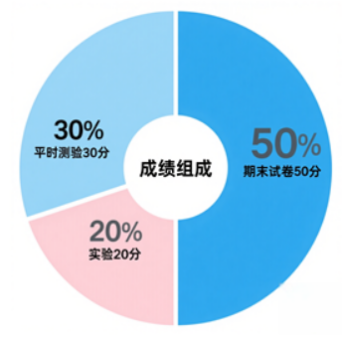
图9 考核体系示意图
Fig.9 Diagram of Assessment System
五、课程内容
Course Information
《控制基础》课程旨在培养学生掌握线性控制系统分析与设计的核心理论体系,建立连续时间系统与离散时间系统的统一分析框架,具备单变量系统与多变量系统的建模、稳定性分析及综合设计能力。通过系统化的理论学习,使学生能够运用数学工具对控制系统的动态特性进行定量分析,为后续专业课程学习奠定坚实的理论基础。依托仿真平台与智能控制实验箱等先进教学设备,构建"理论-仿真-实践"三位一体的实验教学体系。重点培养学生运用现代计算机辅助设计工具解决实际工程问题的能力,通过系统辨识、控制器设计、硬件在环验证等实验环节,使学生掌握从数学模型到物理实现的完整设计流程,强化工程实践能力和创新意识。课程教学文件见图10。
The course aims to equip students with the core theoretical system for the analysis and design of linear control systems, establishing a unified analytical framework for continuous-time systems and discrete-time systems, and acquiring the capabilities of modeling, stability analysis and comprehensive design for both single-variable and multivariable systems. Through systematic theoretical study, students can apply mathematical tools to conduct quantitative analysis of the dynamic characteristics of control systems, laying a solid theoretical foundation for their follow-up professional courses. Leveraging advanced teaching facilities such as simulation platforms and intelligent control experiment boxes, the course establishes a "theory-simulation-practice" trinity experimental teaching system.The course prioritizes the cultivation of students’ ability to solve practical engineering problems with modern computer-aided design tools. Through experimental modules such as system identification, controller design and hardware-in-the-loop verification, students can grasp the complete design process from mathematical modeling to physical implementation, thereby enhancing their engineering practice capabilities and innovative awareness. The teaching resource is shown in Fig. 10.
图10课程文件
Fig.10 Course materials
理论课程内容:
Theoretical Course Content:
Lecture 1- Introduction to the course
本讲是课程导论,系统讲解反馈控制的核心思想,并以经典瓦特离心调速器为工程实例,深入剖析其自动调节机制所蕴含的反馈控制原理。课程内容涵盖控制系统的基本组成要素,包括动态元件(如惯性环节)与静态元件(如比例环节)的功能特性,讲解如何通过方框图这一标准化建模工具对系统进行结构化描述,并初步探讨控制系统的分类方法。
Lecture 1- This lecture serves as an introduction to the course. It systematically elaborates on the core concept of feedback control and takes the classic Watt centrifugal governor as an engineering example to deeply analyze the feedback control principles embodied in its automatic regulation mechanism. The content covers the basic components of control systems, including the functional characteristics of dynamic elements (e.g., inertial elements) and static elements (e.g., proportional elements). It explains how to use block diagrams as a standardized modeling tool for the structural description of systems, and preliminarily discusses the classification methods of control systems.
Lecture 2- Models of physical systems
本讲聚焦物理系统数学建模的核心方法,系统讲解微分方程建模、状态空间表示法及非线性系统线性化处理等关键技术,并引入经典控制理论中至关重要的传递函数概念。
Lecture 2- This lecture focuses on the core methodologies for mathematical modeling of physical systems, systematically elaborating on key techniques including differential equation modeling, state-space representation, and linearization of nonlinear systems. It also introduces the critical concept of the transfer function, which is of fundamental importance in classical control theory.
Lecture 3- Modeling and Analysis of Multivariable Control Systems
本讲深入讲解多变量控制系统的建模与分析,重点为矩阵传递函数的描述方法,对比状态空间模型与传递函数模型的本质差异,引入多变量系统频域分析方法,详细解析奈奎斯特图和伯德图,以及最小相位系统的概念。
Lecture 3- This lecture delivers an in-depth exposition on the modeling and analysis of multivariable control systems, with a key focus on the representation method of matrix transfer functions. It compares the essential differences between state-space models and transfer function models, introduces frequency-domain analysis approaches for multivariable systems, and elaborates in detail on Nyquist plots, Bode plots, and the concept of minimum-phase systems.
Lecture 4- Basic elements and their responses
本讲系统分析常见基本动态环节的时域与频域特性。详细讲解一阶、二阶系统、积分、微分及纯滞后环节在时间和频率领域的响应,从而理解系统的动态性能。
Lecture 4- This lecture systematically analyzes the time-domain and frequency-domain characteristics of common basic dynamic elements. It elaborates on the responses of first-order and second-order systems, integrator, differentiator and pure system with delay in both time and frequency domains, so as to clarify the dynamic performance of the system.
Lecture 5- Fundamental matrix derivation
本讲深入现代控制理论的核心,讲解状态转移矩阵的数学性质和系统规范型的结构分析,重点讲解系统能控性与能观性两个基本结构特性:能控性与能观性的定义和判断条件,引入赫尔维茨稳定性判据。
Lecture 5- This lecture delves into the core of Modern Control Theory, elaborating on the mathematical properties of the state transition matrix and the structural analysis of canonical forms of systems. It focuses on two fundamental structural properties of systems—controllability and observability, covering their definitions and judgment criteria. Furthermore, the Hurwitz stability criterion is introduced.
Lecture 6- Feedback control systems
本讲继续反馈控制主题,以电压稳定系统工程实例为载体,讲解闭环控制系统的基本结构组成与动态工作原理,详细讲解负反馈引入后对系统性能产生的根本性影响,如对稳定性、精确度和抗扰性的改变。
Lecture 6- This lecture continues the theme of feedback control. Taking the voltage stabilization system as a practical engineering case, it elaborates on the basic composition and dynamic operating principles of closed-loop control systems. Furthermore, it provides a detailed analysis of the fundamental effects of introducing negative feedback on system performance, including the improvements in system stability, accuracy and disturbance rejection.
Lecture 7- Control system structure
本讲系统讲解控制系统的典型结构类型,包括反馈控制、前馈控制、反馈前馈复合控制及级联系统四种结构的核心原理。讲解如何通过等效变换法在复杂系统方框图简化中的应用,为后续控制系统建模、稳定性分析及性能优化提供坚实的理论基础。
Lecture 7- This lecture systematically expounds on the typical structural configurations of control systems, covering the core principles of four fundamental structures: feedback control, feedforward control, compound control, and cascade systems. It elaborates on the application of the equivalent transformation method in simplifying block diagrams of complex systems, laying a solid theoretical foundation for the subsequent modeling, stability analysis and performance optimization of control systems.
Lecture 8- Closed-Loop system stability
本讲聚焦闭环系统稳定性分析这一核心问题,讲解赫尔维茨判据的应用,重点推导并详细讲解频域分析中的关键工具——奈奎斯特稳定判据,并通过典型工程案例讲解其在实际控制系统中的具体应用方法。
Lecture 8- This lecture focuses on the core issue of stability analysis for closed-loop systems. It introduces the application of the Hurwitz criterion, and places emphasis on the derivation and detailed interpretation of the Nyquist stability criterion, a key tool in frequency-domain analysis. In addition, it explains the specific application methods of this criterion in practical control systems with typical engineering cases.
Lecture 9- Stability analysis using Bode plots
本讲讲解如何利用伯德图对控制系统稳定性进行判定,包括一般系统与特殊情况的综合分析。分析含有纯滞后环节的系统的稳定性。进一步,讲解史密斯预估器。
Lecture 9- This lecture explains how to employ Bode plots to determine the stability of control systems, covering the comprehensive analysis of both general systems and special cases. It addresses the stability analysis of systems involving pure delay elements, and further introduces and elaborates on the Smith predictor.
Lecture 10-Quality of control
本讲围绕评估控制系统的性能品质进行讲解,分析稳态误差与系统类型的内在关系。
Lecture 10- This lecture focuses on the evaluation of control system performance specifications, and analyzes the inherent relationship between steady-state error and system types.
Lecture 11- The design and correction of control systems
本讲系统讲解控制系统的设计与校正方法,包括根轨迹法、基于积分指标的优化法以及频域响应方法(使用相角/幅值裕度),并引出最大模值准则。
Lecture 11- This lecture systematically introduces the design and correction methods for control systems, including root locus method, the optimization method based on integral indices, and the frequency response method (using phase and gain margins). It also presents the criterion of maximum magnitude.
Lecture 12- Compensators and controllers
本讲详细讲解三种基本频域校正器:超前、滞后和超前-滞后校正网络。讲解各自的频率特性和其对系统性能的调节作用,详细讲解如何根据不同的设计目标进行矫正器的选择和应用。
Lecture 12- This lecture elaborates on three fundamental frequency-domain compensators: lead, lag, and lead-lag compensation networks. It explains their respective frequency characteristics and regulating effects on system performance, and provides a detailed account of how to select and apply the compensators in accordance with different design objectives.
Lecture 13- PID controller design and tuning
本讲讲解工业控制领域应用最为广泛的PID控制器,系统讲解比例、积分、微分三种控制作用的机理、意义以及实现形式。重点讲解如何通过工程方法整定PID参数,对经典的齐格勒-尼古尔斯整定法则进行特别介绍。
Lecture 13- This lecture focuses on the PID controller, the most widely adopted controller in the industrial control field. It systematically explains the mechanisms, significance and implementation forms of the three fundamental control actions: proportional, integral and derivative. With a focus on engineering tuning methods for PID parameters, the classic Ziegler-Nichols tuning rules are specially introduced.
Lecture 14- Discrete-time systems design
本讲讲解离散系统与Z变换数学工具的基本原理和应用方法,讲解采样过程、保持器的本质与作用,全面介绍数字控制系统的基本构成,最后引出离散系统的传递函数——脉冲传递函数的概念。
Lecture 14- This lecture explains the fundamental principles and application methods of discrete systems and the mathematical tool of Z-transform. It elaborates on the essence and functions of the sampling process and signal holders, and provides a comprehensive introduction to the basic composition of digital control systems. Finally, it introduces the concept of the transfer function for discrete systems—the pulse transfer function.
Lecture 15- Digital Control Analysis
本讲深入数字控制系统分析,重点讲解带理想采样器与零阶保持器的系统的离散时间传递函数,闭环系统描述,稳定性分析设计,离散时间控制器的数字实现。
Lecture 15- This lecture provides an in-depth analysis of digital control systems, focusing on DT transfer function of the systems with ideal sampler and zero order hold. CL system description. Stability analysis. Design. Digital implementation of the DT controllers.
Lecture 16- Multivariable systems
本讲围绕多变量系统,讲解多输入多输出矩阵传递函数的描述方法,并深入探讨基于状态空间模型与传递函数矩阵的特征方程求解及稳定性分析。
Lecture 16-Multivariable systems. Matrix transfer function of the MIMO systems. Stability analysis. Characteristic equation using state space and matrix transfer function models.
课堂练习:
Class exercises
Class 1-Dynamic systems description
本节聚焦于动态系统建模的核心方法,系统阐述微分方程、状态空间模型和传递函数这三种基本数学模型的构建原理与应用场景。通过对比时域与复频域的分析视角,揭示不同模型在系统动态特性刻画中的互补性,为后续稳定性分析、频域综合等研究奠定坚实的数学理论基础。
This section introduces the basic mathematical models used to describe dynamic systems. The section focuses on three core methods: differential equations, state-space models, and transfer functions. This explanation shows how these methods describe system behavior from the time domain and complex-frequency domain, laying the mathematical groundwork for further system analysis.
Class 2- Frequency responses
本节聚焦于系统对正弦输入信号的稳态响应特性——频率响应,讲解频率响应的两种主要图形工具——奈奎斯特图和伯德图,详细解析如何利用这些图形工具高效分析系统增益与相位的频率依赖性,为后续控制系统设计与性能优化提供关键分析手段。
This section explains the steady-state response of a system to a sinusoidal input signal, which is called the frequency response. We will introduce two main graphical tools for frequency response: the Nyquist plot and the Bode plot. We will learn how to use these tools to visually analyze the system's gain and phase as the frequency changes.
Class 3-Hurwitz stability criterion
本节重点讲授线性时不变系统稳定性分析的代数判据——赫尔维茨判据,该方法通过系统特征方程的系数直接构造特殊矩阵结构实现稳定性判定。具体而言,将特征方程各项系数按特定规则排列成阶梯状赫尔维茨行列式,通过验证该行列式所有顺序主子式是否均为正数,即可直接判断系统稳定性,无需解算特征根,是分析系统稳定性的重要方法。
This section focuses on the Hurwitz criterion, an algebraic criterion for the stability analysis of linear time-invariant (LTI) systems. This criterion determines the stability of a system by directly constructing a special matrix structure with the coefficients of the system’s characteristic equation. Specifically, the coefficients of the characteristic equation are arranged into a stepped Hurwitz determinant in accordance with specific rules. The stability of the system can be directly judged by verifying whether all the leading principal minors of the determinant are positive, without calculating the characteristic roots. Therefore, it is an important method for system stability analysis.
Class 4-Nyquist stability criterion
本节系统阐述基于开环频率响应曲线判定闭环系统稳定性的奈奎斯特稳定性判据。该判据通过图形化分析开环系统在复平面上的频率响应轨迹,为包含纯延迟环节、高阶次系统等复杂情况提供了直观且有效的稳定性判定方法,是控制理论中的核心内容。
This section systematically expounds on the Nyquist Stability Criterion, which judges the stability of closed-loop systems on the basis of open-loop frequency response curves. By means of graphical analysis of the frequency response trajectory of the open-loop system in the complex plane, this criterion offers an intuitive and effective approach to stability determination for complex systems including those with pure delay elements and high-order systems, and stands as a core component of control theory.
Class 5-Steady state analysis
本节深入探讨控制系统的稳态性能分析,重点聚焦于稳态误差这一核心指标。通过系统阐述系统类型(0型、I型及更高阶次系统)与典型输入信号(阶跃、斜坡、加速度等)之间的内在关联,建立系统类型与输入信号类型之间的稳态误差定量关系,最终实现对控制系统稳态精度的科学评估与性能优化。
This section delves into the steady-state performance analysis of control systems, focusing on steady-state error as the core performance index. By systematically elaborating on the inherent relationship between system types (Type 0, Type I and higher-order systems) and typical input signals (step, ramp, acceleration, etc.), a quantitative relationship of steady-state error corresponding to different system types and input signal types is established, which ultimately realizes the scientific evaluation of steady-state accuracy and performance optimization of control systems.
Class 6-Root locus method
本节系统学习根轨迹法这一核心图形化分析技术,该方法通过绘制系统开环增益等参数变化时闭环特征根在复平面上的运动轨迹,直观揭示参数变动对系统稳定性和动态性能的影响规律。
This section studies the root locus method. This is a graphical technique that shows how the closed-loop poles move in the s-plane when a system parameter, like gain, changes. This allows us to visually analyze how the parameter affects the system's stability and dynamic performance.
Class 7-Stability degree and resonance degree
本节系统阐述控制系统的相对稳定性评估方法,重点解析稳定裕度(相角裕度与幅值裕度)的核心概念及其物理意义,同时深入探讨谐振峰值与谐振频率的工程定义。这些关键指标为量化系统在临界稳定状态下的安全余量提供了理论依据。
This section systematically elaborates on the assessment methods for the relative stability of control systems, focusing on the analysis of the core concepts and physical significance of stability margins (phase margin and gain margin). Meanwhile, it conducts an in-depth discussion on the engineering definitions of the resonant peak and resonant frequency. These key indicators provide a theoretical basis for quantifying the safety margin of a system in a critically stable state.
Class 8- Systems quality - frequency domain methods
本节开启数字控制系统理论的学习,重点剖析采样与保持这一核心离散化过程,系统阐述采样定理的工程应用及零阶保持器的信号重构机理,为数字控制系统的稳定性分析、动态性能评估及控制器设计提供数学工具支撑。
This section begins the study of the theory of digital control systems, focusing on the analysis of sampling and holding—the core discretization process. It systematically elaborates on the engineering applications of the sampling theorem and the mechanism of signal reconstruction realized by the zero-order hold (ZOH), providing essential mathematical support for the stability analysis, dynamic performance evaluation and controller design of digital control systems.
Class 9-Sampled data systems – transfer function derivation
本节围绕采样系统的传递函数(脉冲传递函数)推导展开,通过 Z 变换实现连续系统模型离散化,为数字控制系统的稳定性与性能分析奠定数学基础。
This section focuses on the derivation of the transfer function (pulse transfer function) of sampled-data systems. It realizes the discretization of continuous system models via the Z-transform, laying the mathematical foundation for the stability and performance analysis of digital control systems.
Class 10-Sampled data systems – analysis of closed loop systems
本节基于脉冲传递函数,系统开展采样数据闭环控制系统的分析与设计。重点内容包括:通过建立闭环系统的脉冲传递函数模型,探讨采样数据系统特有的稳定性分析问题,阐述数字控制器实现过程中需关注的量化误差、计算延迟等关键问题。
This section systematically performs the analysis and design of closed-loop sampled-data control systems on the basis of the pulse transfer function. The key contents include: establishing the pulse transfer function model of the closed-loop system, investigating the unique stability analysis problems of sampled-data systems, and elaborating on critical issues such as quantization errors and computational delays that require attention in the implementation of digital controllers.
实验课程内容:
Laboratory Course Content:
Through systematic basic experimental training, students will master the core skills of control theory, including proficient operation of instruments such as the XMN-2A teaching experiment box and digital oscilloscope, as well as the use of simulation software for the design and simulation analysis of automatic control systems. Meanwhile, students will develop the ability to perform dynamic analysis, parameter optimization and preliminary design of typical units and structures of control systems using typical devices such as operational amplifiers and step signal sources. In addition, students’ abilities in experimental fault diagnosis and troubleshooting, error analysis of experimental results and problem-solving will be strengthened, laying a solid theoretical and practical foundation for the study of subsequent professional courses.
通过系统化的基础实验训练,使学生掌握控制理论核心技能,包括熟练操作XMN-2A教学实验箱及数字示波器等仪器设备,并运用仿真软件完成自动控制系统的设计与仿真分析;同时培养学生基于运算放大器、阶跃信号等典型器件,对控制系统的典型环节和典型结构进行动态分析、参数优化及初步设计的能力;此外,强化学生实验故障诊断与排除、实验结果误差分析及问题解决的能力,为后续专业课程学习奠定扎实的理论与实践基础。
Tutorial 1 - Introduction to Simulation Software
本实验聚焦MATLAB在控制系统仿真中的应用,通过语言编程工具实现典型一阶系统的数学模型构建与参数化分析,同时借助SIMULINK图形化仿真环境搭建等效系统模型,对比两种仿真方法在操作便捷性、计算效率等方面的差异。实验重点观测不同时间常数、增益系数等关键参数对典型一阶环节阶跃响应曲线的影响,包括上升时间、稳态值及超调量等动态特性,从而深化学生掌握仿真软件在控制系统分析与设计中的综合应用能力。
This experiment focuses on the application of MATLAB in the simulation of control systems. It realizes the construction and parametric analysis of mathematical models for typical first-order systems through programming tools, and simultaneously builds equivalent system models using the SIMULINK graphical simulation environment, comparing the differences between these two simulation methods in terms of operational convenience, computational efficiency, and other aspects. The experiment places emphasis on observing the impacts of key parameters (such as different time constants and gain coefficients) on the step response curves of typical first-order links, including dynamic characteristics like rise time, steady-state value, and overshoot. This deepens students' ability to comprehensively apply simulation software in the analysis and design of control systems.
Tutorial 2-Stability of linear systems
本实验基于运算放大器搭建符合理论设计要求的二阶及三阶系统控制电路,通过配置不同电路参数,观测系统在不同阻尼比、自然频率等关键参数下的阶跃响应特性。
In this experiment, control circuits of second-order and third-order systems complying with theoretical design requirements are constructed using operational amplifiers. By configuring different circuit parameters, the step response characteristics of the system under key parameters including varying damping ratios and natural frequencies are observed.
Tutorial 3- Static accuracy
本实验通过分析闭环极点预判系统的稳定性。闭环极点是闭环传递函数分母多项式(特征方程)的根,其位置分布直接决定系统的稳定性,可以利用MATLAB中的tf2zp函数直接提取零极点,或通过root函数求分母多项式的根获得,从而判断系统的稳定性。
To judge the stability of the system, only the closed-loop pole of the system is required, and the closed-loop pole of the system is the root of the denominator polynomial of the closed-loop transfer function and their positional distribution directly determines the stability of the system. One can directly extract the zeros and poles using the tf2zp function in MATLAB, or obtain them by solving the roots of the denominator polynomial with the root function, thereby judging the stability of the system.
Tutorial 4- Phase-lead and phase-lag compensation, PID controllers
本实验聚焦于控制系统校正技术的实践应用,通过在原系统中引入自设计的超前-滞后校正装置,通过参数调整,使系统同时满足相位裕量(Phase Margin)和增益裕量(Gain Margin)的稳定性指标要求。优化系统稳定性(满足相位/增益裕量要求)。在此基础上,深入探究校正装置对系统动态性能的影响,学习掌握校正装置的设计原理与实现方法。
In the original system, add self-designed phase lead and phase lag correction devices to ensure that the phase margin and gain margin of the system meet the requirements. Study the impact of the correction device on the dynamic performance indicators of the system and learn the design and implementation methods of the correction device.
Tutorial 5- Attenuation index and tracking index
本实验基于MATLAB Simulink仿真平台,通过构建典型控制系统模型,重点开展系统动态性能分析,包括衰减指标(Attenuation Index)和跟踪指标(Tracking Index)的理论计算与仿真验证,旨在使学生掌握控制系统性能指标的核心计算方法,并熟练运用Simulink工具进行系统建模、仿真分析及性能评估,培养其运用现代仿真技术解决控制工程问题的实践能力。
This experiment is based on the MATLAB Simulink simulation platform to focus on conducting dynamic performance analysis of the systems by constructing models of typical control systems, including the theoretical calculation and simulation verification of the Attenuation Index and Tracking Index. The objective is to enable students to master the core calculation methods for control system performance indicators, proficiently use Simulink tools for system modeling, simulation analysis and performance evaluation, and cultivate their practical ability to solve control engineering problems by applying modern simulation technologies.
Tutorial 6- Root locus method
本实验依托MATLAB仿真平台,开展控制系统根轨迹与频率特性分析方法的计算机辅助设计实践。通过系统化的仿真实验操作,使学生熟练掌握根轨迹法与时域/频域分析工具的软件实现,深化对控制理论中经典频域设计方法(如根轨迹法、Bode图分析)的工程应用理解,提升计算机辅助控制系统设计的综合能力。
This experiment carries out computer-aided design (CAD) practice on the analytical methods of root locus and frequency characteristics of control systems based on the MATLAB simulation platform. Through systematic simulation experiment operations, students will proficiently master the software implementation of root locus methods and time/frequency domain analysis tools, deepen their understanding of the engineering applications of classic frequency domain design methods in control theory (such as root locus method and Bode plot analysis), and enhance their comprehensive capabilities in computer-aided control system design.
Tutorial 7- Sampled-data systems
本实验采用MATLAB仿真平台,开展离散时间控制系统分析与设计工作。重点研究采样周期对信号采样与重构过程的影响,深入分析采样系统的稳定性特性及瞬态响应动态性能。
This experiment adopts the MATLAB simulation platform to carry out the analysis and design of discrete-time control systems. It focuses on investigating the influence of sampling periods on the process of signal sampling and reconstruction, and conducts an in-depth analysis of the stability characteristics and transient response dynamic performance of sampled systems.
六、参考书籍
Reference Textbooks
1. Gessing R.: Control Fundamentals, Wydawnictwo Politechniki Śl., Gliwice 2004.
2. Franklin G.F, J.D. Powell and Emani-Naeini: Feedback control of Dynamic Systems, (Third Edition) Addison-Wesley, 1994
3. Phillips CL., Harbor R.D.: Feedback Control Systems (Third Edition) Prentice Hall, 1996.
4. Goodwin G.C., Graebe S.F., Salgado M.E.: Control Systems Design, Prentice Hall, 2001.
5. 胡寿松. 自动控制原理(第七版). 科学出版社, 2019年1月.
七、展望
Future Work
《控制基础》课程将持续深化改革,不断夯实学生专业基础,致力于培养理论扎实、实践能力强的复合型工程技术人才。在课程内容方面,将有机融入智能控制、工业互联网等前沿技术及相关工程实例,推动教学内容与行业发展同步更新,强化理论知识与工程实践的联系。教学实施层面,本课程将构建并深化“理论—仿真—实验”递进式教学体系,依托模块化、开放式的实验平台,系统支持学生完成从建模、算法设计到调试实现的全流程工程实践。通过开展源于真实工程问题的项目式教学,并推动虚拟仿真与实体系统的有机融合,有效提升学生的动手能力与工程适应性。课程旨在实现理论与实践的深度贯通,着力培养学生系统思维与解决复杂工程问题的综合能力,为人工智能、智能制造等前沿领域输送具备创新精神的高素质技术人才。
The course of Basic of Control will continue to deepen its reform, steadily consolidate students' professional foundations, and commit itself to cultivating interdisciplinary engineering and technical talents with solid theoretical knowledge and strong practical capabilities. In terms of course content, the course will integrate cutting-edge technologies such as intelligent control and industrial internet, together with relevant engineering cases, to keep the teaching content updated in step with industrial development and strengthen the connection between theoretical knowledge and engineering practice. At the teaching implementation level, the course will establish and refine a progressive teaching system featuring “theory–simulation–experiment”. Based on a modular and open experimental platform, it will systematically support students in completing the full engineering practice cycle from modeling and algorithm design to debugging and implementation. By carrying out project-based teaching derived from real engineering problems and promoting the integration of virtual simulation and physical systems, the course will effectively improve students’ practical skills and engineering adaptability. The course aims to achieve in-depth integration of theory and practice, focus on cultivating students’ systematic thinking and comprehensive ability to solve complex engineering problems, and cultivate high-quality technical talents with an innovative spirit for cutting-edge fields including artificial intelligence and intelligent manufacturing.
